预计到2025年,道路上将有数百万辆自动驾驶汽车,无人机的年销售额也将达到数十亿,对于消费者、制造商和监管者来说,安全性和可靠性是重要的考量因素。但为了防止自主机器的硬件和软件出现故障、遭受攻击或其他失效,所采用的解决方案也会增加成本。这些成本来自性能特性、能耗、重量以及半导体芯片的使用。
来自罗切斯特大学、乔治亚理工学院以及深圳社会人工智能与机器人研究所的研究人员表示,现有的在减少开销与保护机器免遭漏洞之间的权衡,是因为采用了“一刀切”的保护方法。他们在《ACM 通讯》发表的一篇论文中,提出了一种新方法,能够根据自主机器系统中不同的漏洞水平做出调整,以提高可靠性并控制成本。罗切斯特大学计算机科学系的助理教授朱宇豪说,当前“一刀切”
方法的一个例子是特斯拉在每辆车中使用两个全自动驾驶芯片(FSD芯片)——这种冗余在第一个芯片失效时提供保护,但使汽车芯片的成本翻倍。相比之下,朱教授表示,他和他的学生采用了更全面的方法来防护硬件和软件的漏洞,并更明智地分配保护资源。“基本思路是对系统的不同部分采用不同的保护策略,”朱教授说。“可以根据软件和硬件的固有特性来细化这种方法。我们需要为软件栈的前端和后端开发不同的保护策略。”
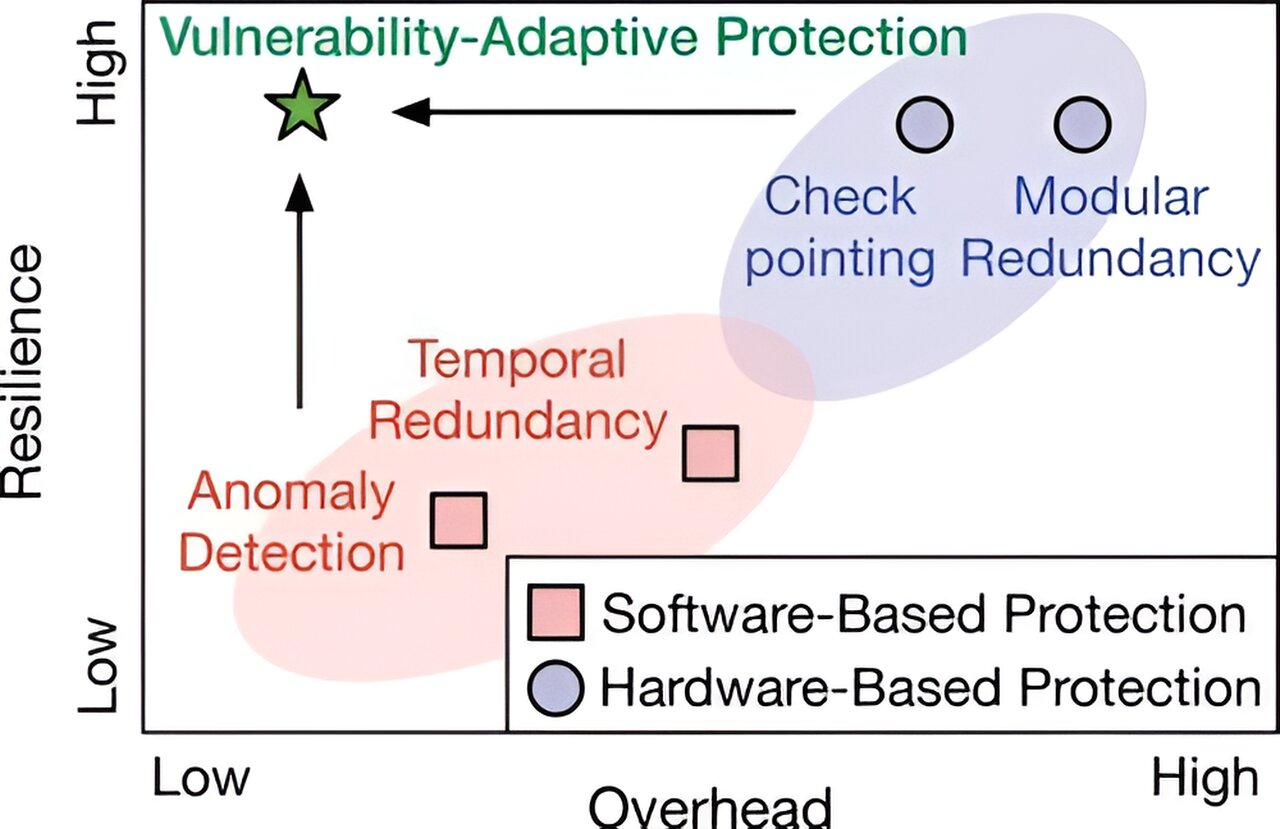
例如,朱教授指出,自主车辆软件栈的前端侧重于通过摄像头和光探测与测距(LiDAR)设备感知环境,而后端则处理这些信息,规划路线,然后向执行器发送命令。“不必在前端投入大量的保护预算,因为它本质上是容错的,”朱教授说。“而后端没有内在的保护策略,但由于它直接与车辆的机械部件接口,所以需要确保安全。”朱教授表示,前端的低成本保护措施包括在数据中过滤异常等基于软件的解决方案。
对于后端更强大的保护方案,他推荐如检查点技术,用于定期保存整台机器的状态,或者选择性地在芯片上复制关键模块。最后,朱教授表示,团队希望克服最近自主机器软件栈中的漏洞,这些软件栈更依赖于神经网络人工智能,通常是从端到端的。“一些最新的例子是,使用一个巨大的神经网络深度学习模型,它既能接收感知输入,也能完成大量不完全理解的计算,并生成对执行器的命令,”朱教授说。
“其优势在于大大提高了平均性能,但发生故障时,无法将失败定位到特定模块。我们希望减轻这种情况,即使常规情况更好,但最糟情况更糟。”